
近日,我校计算机科学与技术学院张永军老师团队在IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 (计算机学会推荐CCF A 类、人工智能领域国际顶级会议)上发表题为“MoCha-Stereo: Motif Channel Attention Network for Stereo Matching”的研究论文。这是贵州大学独立完成并作为唯一通讯单位在CVPR上发表论文,第一作者为我校2022级研究生陈子扬同学,通讯作者为张永军老师。
CVPR是全球人工智能和计算机视觉领域顶级国际会议,有着计算机视觉领域“奥斯卡”的美誉。在谷歌学术Google Scholar指标2021年至2023年列出的全球最有影响力的科学期刊/会议中,CVPR均位列第四,仅次于《自然》《新英格兰医学杂志》《科学》。
双目视觉立体匹配算法是智能机器人、自动驾驶、无人机导航、以及智慧机器人导航等产业AI应用的关键算法,对于计算机视觉领域和三维立体感知等AI技术,具有十分重要的意义。本文提出捕获特征通道中重复出现的几何结构以修正立体匹配代价计算的方法,简称MoCha-Stereo。MoCha-Stereo超过了谷歌HITNet、普林斯顿RAFT-Stereo、牛津大学GANet、欧洲NAVER人工智能实验室CroCo-Stereo、东京大学LocalExp等算法的性能,从2023年5月起,在全球双目视觉算法权威榜单KITTI排名第一。
【算法简介】
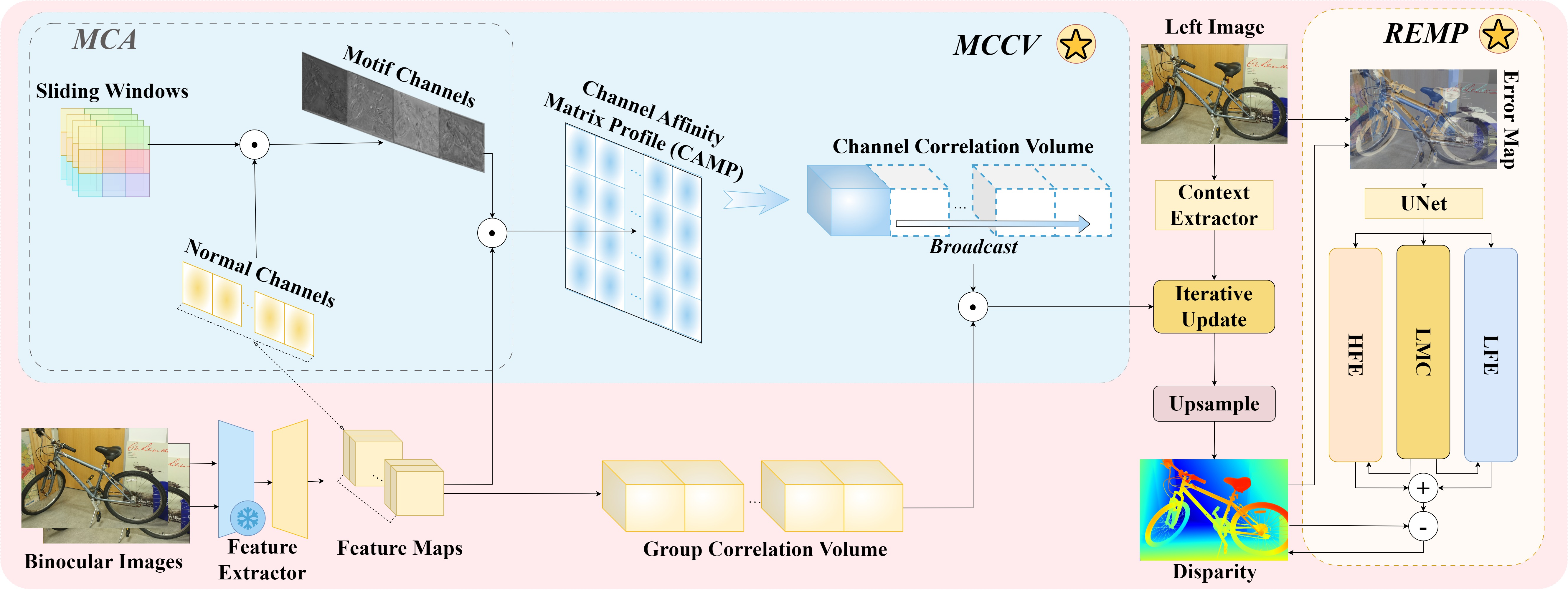
在双目立体匹配领域,CroCo-Stereo和GANet等基于深度学习的立体匹配技术已经取得了重大进展。然而,现有方法在生成特征通道的过程中不可避免地会丢失几何结构信息,导致边缘细节不匹配。本文提出Motif Channel Correlation Volume (MCCV),通过将捕捉特征通道中重复出现的模式,并将这种模式重新投影到特征图和成本体积上,实现更精确的双目图像边缘细节的匹配代价计算。为了进一步细化几何纹理的匹配,本文提出REMP模块,结合重建误差和高低频特征中重复出现的模式,惩罚全分辨率视差的错误计算。以上范式构成了MoCha-Stereo网络,实验表明,MoCha-Stereo修复了特征通道中丢失的细节,大大提升了算法对边缘纹理结构的匹配能力。